Embodied AI

To understand natural intelligence we must view it as an active process that emerges when brains interact through bodies with the environment that they have evolved ” Andrew Philippides
Professor of Biorobotics
Much contemporary AI research revolves around work on large challenging datasets for classification and regression, in which temporal information is not a significant feature. In contrast, animals exist in a dynamic world, actively sampling their environments and changing the incoming information so that it is easier to interpret, learn and recall. Through evolution the computational load on the brain has been reduced through outsourcing computation to specialised bodies and movements suited to their environment and the task at hand. In our research on embodied AI we focus on the dynamic nature of intelligence which can lead to complex behaviour with minimal computation. A classical example is the Braitenberg light following vehicle that achieves its goal solely through crossed connections from light sensors to motors without any explicit algorithm or information processing device. We therefore combine biological experiments with robotics, machine learning and neural modelling both to better understand biological intelligence and to inspire novel AI and biorobotic algorithms.
Our work encompasses biohybrid systems and VR experiments with animals in which we try to address how dynamic information is interpreted by the brain. We study neuromorphic chemical and visual sensors in which the incoming information is a temporal stream to be deciphered by spiking neural networks. Insights gained are applied to autonomous robots exploring complex unstructured environments for applications ranging from farming to space exploration. We also consider how collective behaviour can be shaped dynamically considering for instance how movement of human crowds can be shaped by the perception of the group they are in. And we investigate how soft and compliant bodies can perform morphological computation without the need for a brain.
Sensors, event-based Vision and eNoses
Agricultural Robotics and Autonomous Systems

Swarm Robotics and Crowd Analysis

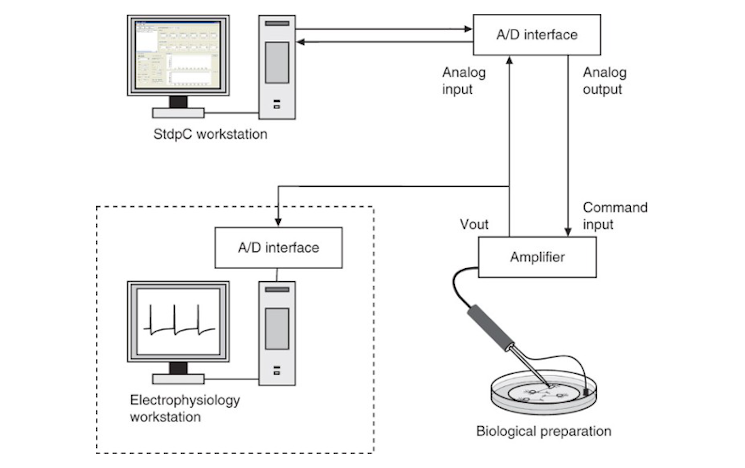
Hybrid Brain-Computer Systems
Intelligent Robotics, Soft Robotics
