Interaction robotics
We explore how humans and robots can work together across diverse settings – from rehabilitation and surgery to industrial and remote operations. Through cutting-edge research in motor control, neural interfacing, machine learning and control theory, we develop intuitive, adaptive robotic systems that enhance human capabilities and safety.

What is interaction robotics?
Interaction robotics focuses on enabling seamless collaboration between humans and robots through research in:
- human-robot collaboration
- human motor control
- human interfacing and intention prediction
- control theory
- machine learning.
Key applications include:
- cobots for industrial tasks
- rehabilitation robotics for therapy
- surgical robots for precision procedures
- teleoperation for remote control
- robotic exoskeletons for mobility assistance.
Research topics
Explore all our interaction robotics research:
- Assistive and rehabilitation robotics
- Cobots for manipulation and teleoperation
- Diagnostic and surgical robotics
- Neural interfacing and human-motor control.
Assistive and rehabilitation robotics
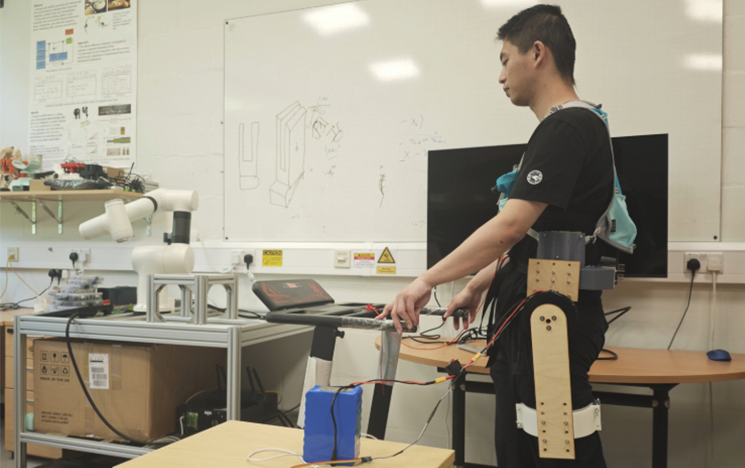
Our group's research in assistive and rehabilitation robotics is aimed at both upper and lower limb systems. We employ a diverse range of robotic platforms, encompassing wearable devices (including exoskeletons, prosthetics, and exosuits) and fixed-base robots (such as Kinova Robotics Arm and Articares H-Man).
Our work is underpinned by a holistic, integrated approach that combines comprehensive technical expertise to develop ergonomic systems that are both comfortable and intuitive to operate. Our methodological approach is characterised by a co-design model for hardware and software, grounded in our neuroscientific expertise, to advance the capabilities of these technologies.
Significant contributions include an adaptive controller that emulates human behaviour during collaborative or adversarial games with the user, as well as a controller that combines teleoperation and manipulation capabilities to enable remote access between therapists and other patients.
- Academics
- References
- H. Wu, C. Zhu, L. Cheng, C. Yang and Y. Li, “Simultaneous Estimation of Human Motion Intention and Time-Varying Arm Stiffness for Enhanced Human-Robot Interaction,” IEEE Transactions on Cognitive and Developmental Systems, vol. 17, no. 3, pp. 510-524
- Y. Li, G. Carboni, F. Gonzalez, D. Campolo and E. Burdet, “Differential game theory for versatile physical human-robot interaction,” Nature Machine Intelligence, 1, pp. 36-43, 2019
- Huang, H.Y., Farkhatdinov, I., Arami, A., Bouri, M. and Burdet, E., 2020. Cable-driven robotic interface for lower limb neuromechanics identification. IEEE Transactions on Biomedical Engineering, 68(2), pp.461-469
- Tiseo, Carlo, Quentin Rouxel, Martin Asenov, Keyhan Kouhkiloui Babarahmati, Subramanian Ramamoorthy, Zhibin Li, and Michael Mistry. “Achieving Dexterous Bidirectional Interaction in Uncertain Conditions for Medical Robotics,” in IEEE Transactions on Medical Robotics and Bionics, doi: 10.1109/TMRB.2024.3506163
- Ang Wei Tech, Li Lei, Foo Ming Jeat, Carlo Tiseo, Wee Seng Kwee. Mobility Aid (US2022096295A1, EP3917482A1,CN113939263A, SG11202104450QA, WO2020159442A1)
- Funders
- European Commission
- EPSRC
- Royal Society
- HEIF
- Collaborators
- Imperial College London
- Nanyang Technological University
- Consejo Superior de Investigaciones Científicas
- Escola Politecnica USP
- University of Edinburgh
Cobots for manipulation and teleoperation
Our research in collaborative robots (Cobots) for manipulation and teleoperation focuses on advancing key technologies that enable seamless human-robot interaction. We have a focus on shared controller design, motion intent estimation, human-robot interface development and end-effector optimization.
We tackle important challenges in designing adaptive control algorithms to ensure safe and responsive robot behaviour in dynamic environments. We use machine learning and sensor fusion to predict and synchronise with human actions.
Additionally, we innovate intuitive human-robot interfaces, including haptic feedback and gesture-based systems, to enhance teleoperation efficiency.
Finally, our end-effector design research explores versatile, sensor-rich tools tailored for collaborative tasks. This bridges the gap between robotic precision and human dexterity in applications ranging from industrial automation to assistive robotics.
- Academics
- References
- Johannsmeier, L., Schneider, S., Li, Y. et al. A process-centric manipulation taxonomy for the organization, classification and synthesis of tactile robot skills. Nat Mach Intell 7, 916–927 (2025)
- Y. Li, G. Ganesh, N. Jarrasse, S. Haddadin, A. Albu-Schaeffer and E. Burdet, “Force, impedance and trajectory learning for contact tooling and haptic identification,” IEEE Transactions on Robotics, 34(5), pp. 1170-1182, 2018
- R. Wen, Q. Rouxel, M. Mistry, Z. Li and C. Tiseo, “Collaborative Bimanual Manipulation Using Optimal Motion Adaptation and Interaction Control: Retargeting Human Commands to Feasible Robot Control References,” in IEEE Robotics & Automation Magazine, doi: 10.1109/MRA.2023.3270222
- Tiseo, C., Merkt, W., Wolfslag, W. et al. Safe and compliant control of redundant robots using superimposition of passive task-space controllers. Nonlinear Dyn (2023). doi:10.1007/s11071-023-09045-x
- Funders
- European Commission
- EPSRC
- HEIF
- Collaborators
- Imperial College London
- Technical University Munich
- University of Edinburgh
- University of Oxford
Diagnostic and surgical robotics
Our research focuses on developing robotic systems that assist surgeons in both diagnostic procedures and surgical interventions. This includes the design of intuitive and efficient human–machine interfaces that enable surgeons to control robotic tools with minimal cognitive and physical effort. We also explore advanced methods for human–robot shared control and autonomous robotic assistance to support surgical workflows.
A key area of interest is the augmentation of surgeon control and dexterity – enabling control of multiple instruments simultaneously, akin to the concept of the fictional “Dr. Octopus”. This capability addresses common collaboration and communication challenges between lead surgeons and their assistants during complex procedures. Hands-free interfaces and adaptive robotic agents can be integrated to support the control of additional instruments, tailored to individual operating styles and task demands.
Another major theme is the automation of diagnostics to maximise access for patients and reduce diagnostic time by supporting clinicians to increase their productivity. This requires systems capable of delivering a range of services that can be deployed and operated independently from the clinical staff.
- Academics
- References
- Y. Huang, W. Lai, L. Cao, S. J. Phee and E. Burdet (2021), Design and Evaluation of a Foot-Controlled Robotic Endoscope Manipulator for Endoscopic Surgery, IEEE Robotics and Automation Letters 6(2):2469-76
- Y. Huang, W. Lai, L. Cao, J. Liu, X. Li, E. Burdet, and S.J. Phee (2021), A Three-limb Teleoperated Robotic System with Foot Control for Flexible Endoscopic Surgery, Annals of Biomedical Engineering 49: 2282-96
- Y. Huang, E. Burdet, L. Cao, P. T. Phan, A. M. Hua, and S. J. Phee (2020), A subject-specific four-degree-of-freedom foot interface to control a surgical robot, IEEE/ASME Transactions on Mechatronics 25(2):951-63
- Tiseo, Carlo, Quentin Rouxel, Martin Asenov, Keyhan Kouhkiloui Babarahmati, Subramanian Ramamoorthy, Zhibin Li, and Michael Mistry. “Achieving Dexterous Bidirectional Interaction in Uncertain Conditions for Medical Robotics,” in IEEE Transactions on Medical Robotics and Bionics, doi: 10.1109/TMRB.2024.3506163
- Funders
- HEIF
- EPSRC Doctoral Training Partnerships
- Collaborators
- Imperial College London
- Nanyang Technological University
- University of Edinburgh
Neural interfacing and human-motor control
Patients with neurophysiological conditions may not be able to perform simple daily activities such as holding a cup or opening a door. Through extensive research in the fields of Neural Interfacing and Human-Motor Control, we aim to implement dedicated robotic assistive systems to help patients regain basic daily functions.
Neural interfacing refers to techniques used to measure biosignals, such as electromyography (EMG), from a human operator to control external devices. In the context of robot-assisted motion, neural interfacing is used to predict the user’s motor intent from biosignals and calculate the necessary robotic assistive force for the intended body movement.
Research in motor control commonly involves constructing mathematical modelling of body biomechanics that mimic human body movement and its motor control. They can be further enhanced by constructing appropriate musculoskeletal models using measurements collected from patients with neurophysiological conditions, generating subject-specific simulation and suggesting ideal robotic assistance to improve patients’ motor function.
- Academics
- References
- Jing, S., Huang, H.Y., Jouaiti, M., Zhao, Y., Yu, Z., Vaidyanathan, R. and Farina, D., 2024. Enhancing the Prediction of Locomotion Transition with High-Density Surface Electromyography. IEEE Journal of Biomedical and Health Informatics
- Huang, H.Y., Arami, A., Farkhatdinov, I., Formica, D. and Burdet, E., 2020. The influence of posture, applied force and perturbation direction on hip joint viscoelasticity. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 28(5), pp.1138-1145
- Huang, H.Y., Farkhatdinov, I., Arami, A., Bouri, M. and Burdet, E., 2020. Cable-driven robotic interface for lower limb neuromechanics identification. IEEE Transactions on Biomedical Engineering, 68(2), pp.461-469
- Tiseo C, Veluvolu K C and Ang W T. ”The bipedal saddle space: modelling and validation”. Bioinspiration & biomimetics, 2018, 14(1), p.015001
- C. Tiseo, S. R. Charitos and M. Mistry, “Exploiting Spherical Projections To Generate Human-Like Wrist Pointing Movements,” 2021 43rd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC), 2021, pp. 6192-6197, doi: 10.1109/EMBC46164.2021.9629550
- Funders
- European Commission
- Collaborators
- Imperial College London
- Consejo Superior de Investigaciones Científicas
- University of Twente
- Delft University of Technology
- EPFL – Swiss Federal Technology Institute of Lausanne
- Ossur
- Santa Lucia Foundation
- Escola Politecnica USP
- Nanyang Technological University
- University of Edinburgh