Dr William Wang
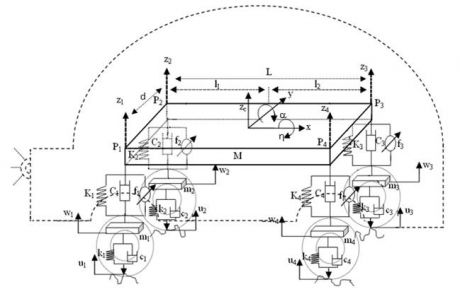
In this research, full vehicle nonlinear active suspension models are being investigated, in which three motions, i.e. the vertical, pitching and rolling, are taken into account. The intelligent control design problem for full vehicle nonlinear active suspension systems with hydraulic actuators are being investigated. The effects of the nonlinear hydraulic actuators with frictional forces are included, and the mathematical model for full vehicle nonlinear active suspension systems with nonlinear hydraulic actuators are used. Results show that passive suspension systems without control, are not sufficient to effectively reduce vibrations arising from travel along rough roads, or to minimize rolling and pitching motions when sharp manoeuvres take place in braking and cornering.